
導入推奨機器
 Recommended system
Recommended system
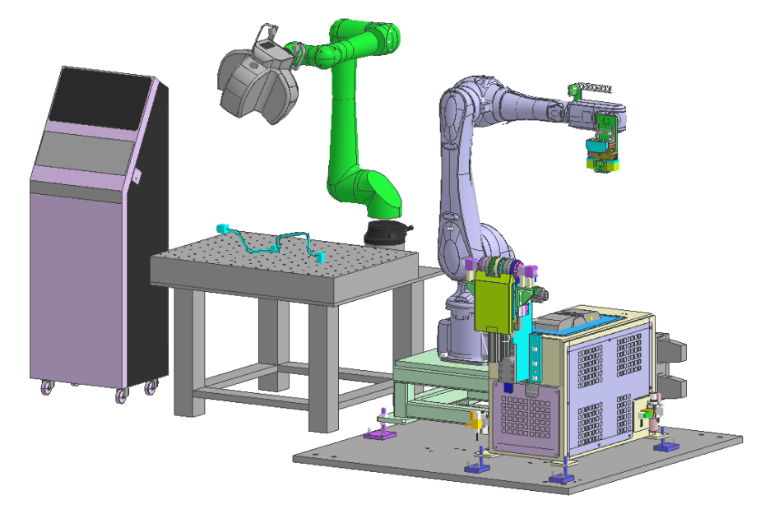
GW型ロボットベンダー
+ 協働ロボフォーマシステム
3DCADデータから、パイプ投入と加工(送り・ヒネリ・曲げ)と取り出し、さらに補正までの全工程を通じて最短時間で行います。GW型ロボットベンダーと協働ロボフォーマを組み合わせたシステムです。
 Overview
システムの概要
Overview
システムの概要
パイプ曲げ加工をパイプの投入から、送り・ヒネリ・曲げ、取り出しまでを、GW型ロボットベンダーが行い、協働ロボフォーマに渡すまでの全工程を自動で行います。
協働ロボフォーマは加工したパイプを3Dスキャナーで測定し、加工データと差異がある場合はGW型ロボットベンダーに補正データとしてフィードバックします。
この機能により短時間に精度が高い良品の加工を行うことができます。
User
ユーザーイメージ

今まで外部にパイプ曲げ加工を依頼していたが、今後は内製でパイプ曲げ加工を行いたい会社様

現在は職人の手作業によりパイプ曲げ加工を行っているが、今後の職人不足が予想され、機械化を図りたい企業様
SYS Feature
システムの特徴
GW型ロボットベンダーが、①パイプの投入から、②送り・ヒネリ・曲げ ③取り出し、協働ロボフォーマに加工済パイプを渡すまでの全工程を自動で行います。
全工程の自動化による省力化を実現します。
協働ロボフォーマはGW型ロボットベンダーが加工したパイプを3Dスキャナーで測定し、GW型ロボットベンダーに補正データとしてフィードバックします。
協働ロボフォーマは動作スピードを250㎜/sec以下に抑えることで現場の安全柵等の設置が不要になります。製造現場における人とロボットとの協働を可能にします。
ロボットの3Dスキャナー部のハンドルを直接手で移動させながら、位置決めボタンを押すことにより測定およびダイレクトティーチング機能によるティーチング作業を行えます。
熟練作業員でなくてもスキルレスでのティーチング作業が可能になります。ティーチングボックスを使用したロボットのティーチング作業と比較し格段に作業負荷の軽減を実現しています。
Device Feature
各機器の特徴
GW型ロボットベンダー GW-SWV-15
左右両曲げにより干渉削減。工程減ができるため、量産コストを低減。
新開発の縦曲げ方式により曲げヘッドがコンパクトで、干渉が少ない。ヘッド左右にそれぞれ2段ずつ(合計4段)の金型が搭載可能で段取りレスが可能。
無人化などFAライン構築に最適のロボットベンダー、設備費用の削減と省スペースも実現。


協働ロボフォーマ RF-1000
協働ロボットと3Dスキャナーを組み合わせた測定装置。
絶対精度を自動補正するマーカー定盤を活用した測定装置。
マークの位置と測定対象であるパイプ位置との比較で絶対精度を保証。
ダイレクトティーチング機能から生成されたプログラムを呼び出して自動再生し、同品種のワークのリピート測定が可能。

製品についてのお問合せ
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。